Neurons in populations can form oscillatory subnetworks, independently of any periodic activity occurring within neurons. Population oscillations can be combined with intraneuronal oscillations to get all kinds of interesting modulation, including phase encoding during bursting.
Oscillations in PopulationsThe early population model for brain waves traces back to Wilson and Cowan (1972). In this elementary model there are two populations of neurons, one excitatory and one inhibitory. They are mutually interconnected, and there are external drives to both populations. Using only spike rate approximations, the network is driven into a limit cycle with sufficient excitation or when the level of mutual inhibition is high. Otherwise, information is transmitted and then the activity decays. The network can be tuned so it exhibits oscillations in the absence of external input, and these oscillations were deemed to resemble brain "waves".
A model like this was enhanced by Amari (1978) who considered the same type of interaction in a population of stochastic and noisy neurons. The averaging of spike times still equates with a rate code, therefore the behaviors invoked are still simple.
There are oscillatory patterns that are highly nonlinear. In fact Chua showed that a chaotic oscillator could be easily constructed using a memristor and a few additional electronic components, including an inductor which is still biologically plausible. However it turns out the inductance can be synthesized in a number of ways, that do not require an actual inductance.
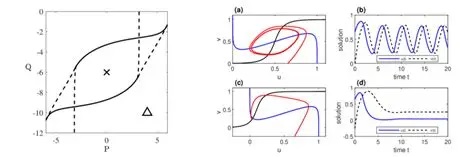
Oscillatory behavior is most easily visualized in the phase plane, even though the visualizations must be kept to 2 or 3 dimensions. For example in the Wilson and Cowan model we can plot E vs I, and see the trajectories and the limit cycle.
As mentioned earlier in the pages on neurons, the phase of intraneuronal oscillations can be reset by timely inhibition. If for example a GABA interneuron has a wide axonal arborization contacting many relay neurons, it can force a local synchronization, indicating that subsequent information will be carried by a population rather than an individual neuron. This is particularly relevant in time-to-first-spike (TTFS) models, where the first spike causes local inhibition which then enables a population code to be transmitted downstream (in other words the location of the first spike acts as a "hot spot" for communication).
Coupled OscillatorsOne of the main takeaways from early network models is that oscillatory behavior and other phase plane dynamics can be created and supported by very simple networks. A minimal Wilson-Cowan model requires only two neurons. A minimal predictive coding network requires four neurons. Complex dynamic population behaviors can be accomplished with just a handful of neurons. Eventually, neural engineers will have a collection of building blocks to choose from, to build complex networks with, much as an engineer has a collection of transistors and op-amps to choose from.
Coupling a set of oscillators can result in rich dynamic behavior. A simple example of couple oscillation is coupled pendulums. Oscillators that begin as independent will tend to synchronize their phases on the basis of small bits of energy that transfer back and forth. The same is true in neural networks.
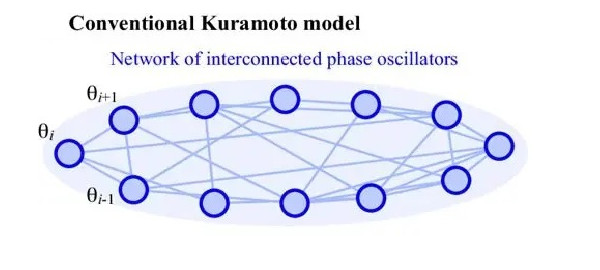
A more general model for coupled oscillation was developed by Kuramoto in 1975. It has the form
dPi/dt = Xi + f(j, Kij sin(Pi-Pj))
where Pi is the phase of the i-th oscillator and the K are "coupling constants" between the oscillators.
This description, while loose, is adequate to illustrate many of the fascinating dynamic behaviors that can emerge from these networks. The possibilities within the Kuramoto phase plane are so rich they're still being studied after 70 years. Chaotic behavior is easy to accomplish, and there are behavior reminiscent of some of the notable achievements of nonlinear thermodynamics (which we'll discuss later, like the stable spatial patterns in coupled chemical interactions such as the Belousov-Zhabotinsky reaction).
All manner of interesting dynamics can be seen in these phase plane visualizations. Bifurcations are evident, along with chaotic regions and regions where the system response is nearly linear. The Kuramoto paradigm is capable of generating just about any trajectory imaginable. The question becomes how to control the network to obtain the desired dynamics.
Next: Chaos
|